Rangliste



Beliebte Inhalte
Anzeigen von Inhalten mit der höchsten Reputation auf 16.12.2017 in allen Bereichen
-
Den Negativfilm gibt es. Das Erscheinen der Kamera wird wohl ziemlich zeitgleich mit der Verfügbarkeit des Ektachromes passieren. Ich sahe da nicht schwarz.1 Punkt
-
Lol. :) Schaut toll aus, gratuliere! Nachdem ich das noch nicht selbst ausprobieren kann hab ich den Code zumindest mal durch gelesen. Drei Typos hätte ich gefunden, wenn ich sonst schon nichts beitragen kann, dann wenigsten das :) Hier bitte: but might damage the camera... who want's that? bool blinkFlag = true; // Thisone is used to confirm reception fo valid IR codes void startRunWithMetering() { // Normaler Startzyklus wie mit EA-1 (plötzlich Kommentar in Deutsch) Wie üblich wieder mal ein super Projekt, weiter so!1 Punkt
-
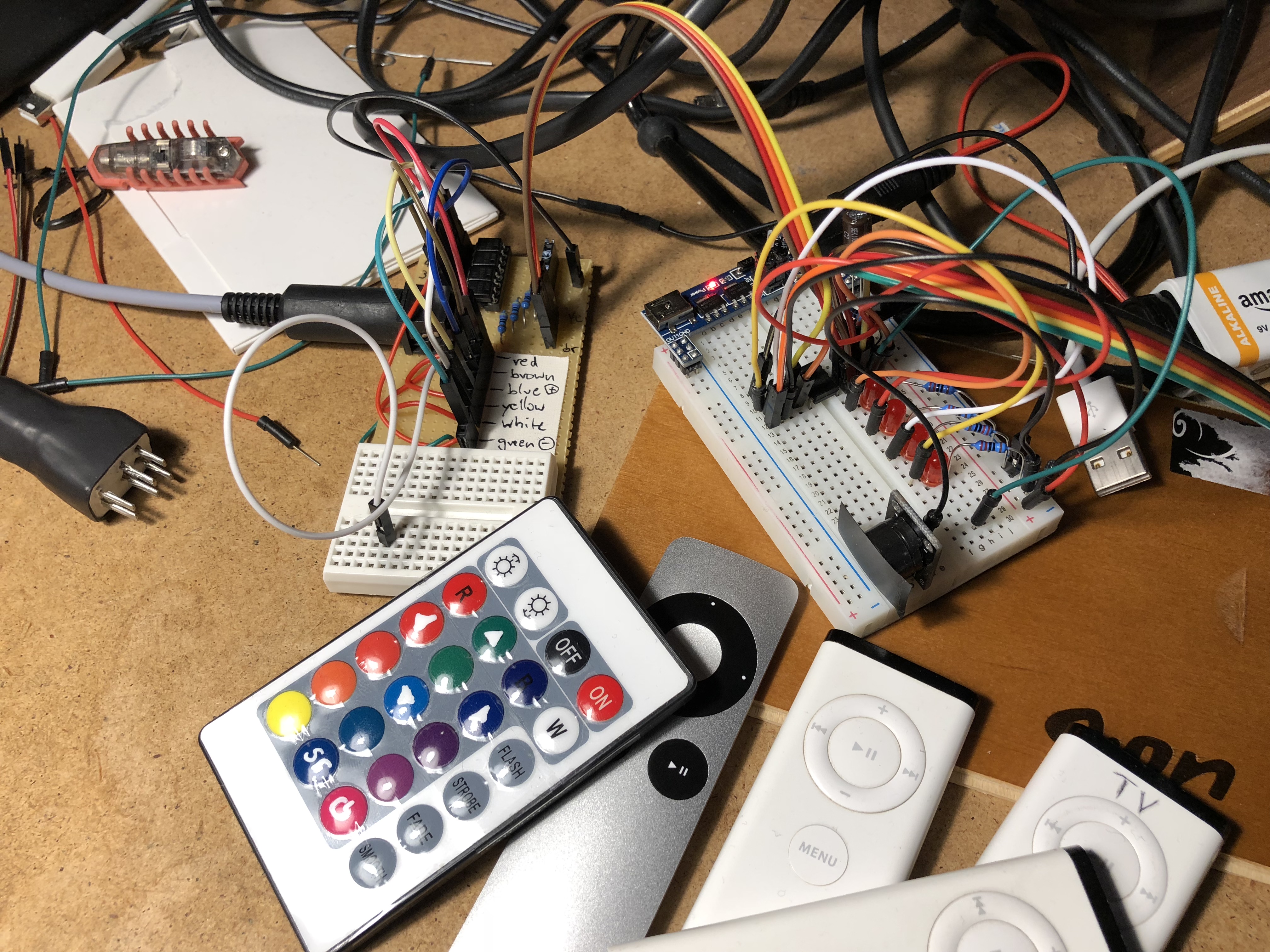
Prototyp mit Debug-Addons. :)
 1 Punkt
1 Punkt -
/* ATtiny85 IR Remote Control Receiver This code simulates the Nikon EA-1 Remote Control Switch and adds extra functions, like IR-Remote control support and a nifty intervalometer with 416 different intervals ranging from 200ms to more than 37 hours. The power needed for the circuit is harvested from the camera (the camera connector has no actual power output). Some documentation on the hardware below: Pin numbering, looking onto the camera side jack (or PCB Front) 3 Green - - Brown 4 2 Red - - Yellow 5 space space 1 Blue - - White 6 Inside the handpiece of the remote control: Sliders move from 0 to 1 for lightmeter and from 1 to 2 for exposure. |-------| |---------| |------| 2 expose | | | | |-------|------| | |------| 1 lightmeter on | | | | | | 0 no connect Brown Blue Red Green Yellow White 4 1 2 3 5 6 \ Hold /\ Load /\ Start / \Light/ The "Load" phase charges a capacitor to ease sudden startup and assure even exposure timing. The entire start mechanism of the Nikon R8/R10 is rather sophisticated and barely documented. We need four relays here to follow the protocol. Not following the protocol can work, but might damage the camera... who want's that? */ #include <util/delay.h> // built-in delay() runs too fast due to timer0 usage in IR receiver ISR /* Apple Remote (all models) 87 EE */ // see https://en.wikipedia.org/wiki/Apple_Remote // *** defines and variables *************************** #define RC_CODE 0x87EE // Apple #define UP_KEY 0x05 // Up #define DOWN_KEY 0x06 // Down #define LEFT_KEY 0x04 // Left #define RIGHT_KEY 0x03 // Right #define MENU_KEY 0x01 // Menu #define ALU_CENTER_KEY 0x2E // Center (Alu RC) #define ALU_PLAY_KEY 0x2F // Play (Alu RC) #define WHITE_PLAY_KEY 0x02 // Play (old white Apple Remote) #define LM_MODE_1ST_SINGLESHOT 1 // On the first single exposure shot, we start with lightmetering. #define LM_MODE_SUB_SINGLESHOT 2 // Subsequent shots do not meter the light again. // These are our four relays int lightmeterPin = 3; // K4 ye + wh : Lightmeter int startPin = 4; // K3 re + gr : Start int loadPin = 1; // K2 bl + re : Load int holdPin = 0; // K1 br + bl : Hold int ledPin = 1; // LED is parallel to load-relay volatile int irBits; // This counts the incoming bits from NEC-encoded IR transmitters in the ISR volatile unsigned long receivedData; // This contains the received code // These are used to maintain the different intervals byte oldIntervalStep = 31; // This is the initial OCR1C value (at 1 MHz / Prescaler 16384 = 524ms) byte newIntervalStep = 31; // store it here after a change, since we only update OCR1C in the ISR int postscaler = 2; // the postscaler doubles the timer1 by POT factors up to 2^16 (39:04:20) volatile int divider = 0; // needed in ISR to do some modulo for intervals > 4.3 sec byte lmMode = LM_MODE_1ST_SINGLESHOT; bool blinkFlag = true; // Thisone is used to confirm reception fo valid IR codes bool aluRemote = false; // Apple's Alumium Remote has one more key than the white one. Reading // that key is ambigious, so we "lock in" to a safe mode once we know for sure // that our RC is not the white one. // *** Setup ********************************************** void setup() { pinMode(lightmeterPin, OUTPUT); pinMode(holdPin, OUTPUT); pinMode(loadPin, OUTPUT); pinMode(startPin, OUTPUT); noInterrupts(); // Set up timeStampr/Counter0 (assumes 1MHz clock) TCCR0A = 0; // No compare matches TCCR0B = 3<<CS00; // Prescaler 64 // Set up INT0 interrupt on PB2 MCUCR = MCUCR | 2<<ISC00; // Interrupt on falling edge GIMSK = GIMSK | 1<<INT0; // Enable INT0 irBits = 32; // Wait for NEC-IR AGC start pulse // Set up timeStampr/Counter1 (assumes 1MHz clock speed, saving some power) TCNT1 = 0; TCCR1 = 0; OCR1C = oldIntervalStep; OCR1A = OCR1C; // interrupt COMPA TCCR1 |= (1 << CTC1); // CTC TCCR1 |= (1 << CS13) | (1 << CS12) | (1 << CS11) | (1 << CS10); // Prescaler 2^14 = 16384 interrupts(); } void ReceivedCode(boolean Repeat) { // Check if Transmitter is not an Apple Remote if ((receivedData & 0xFFFF) != RC_CODE) { if (!Repeat) blinkLED(); int key = receivedData>>16 & 0xFF; // extracting the command byte, full 8 bits // We could actually learn some arbitrary codes here and keep them in the EEPROM. Wouldn't // be a very interactive experience though, so skipping that part until someone asks for it. if ((key != 0xFF) && !Repeat && !digitalRead(lightmeterPin)) startRunWithMetering(); else if ((key != 0xFF) && !Repeat && digitalRead(lightmeterPin)) stopRun(); } else { // This is comfort mode with the Apple Remote. :) int key = receivedData>>17 & 0x7F; // extracting the command byte, ignoring the 1-bit to match all Apple Remotes // If we receive codes unique to an alu RC, let's remember that to fight ambiguity if (((key == ALU_CENTER_KEY) && !Repeat) || ((key == ALU_PLAY_KEY) && !Repeat)) aluRemote = true; // Now let's determine what to do if ((key == ALU_PLAY_KEY) && !Repeat && !digitalRead(lightmeterPin)) startRunWithMetering(); else if ((key == ALU_PLAY_KEY) && !Repeat && digitalRead(lightmeterPin)) stopRun(); else if ((key == ALU_CENTER_KEY) && !Repeat) { if (lmMode == LM_MODE_1ST_SINGLESHOT) meterOnce(); singleFrame(); } else if ((key == MENU_KEY) && !Repeat) { //MENU_KEY if (TIMSK & ( 1 << OCIE1A )) TIMSK &= ~(1 << OCIE1A); // enable timer interrupt else TIMSK |= (1 << OCIE1A); // disable timer interrupt } else if ((key == DOWN_KEY) && !Repeat) { oldIntervalStep = newIntervalStep; newIntervalStep = constrain(oldIntervalStep + 10, 1, 255); } else if ((key == UP_KEY) && !Repeat) { oldIntervalStep = newIntervalStep; if (postscaler <= 4) { // This could lead to intervals <200ms, which we do want to avoid newIntervalStep = constrain(oldIntervalStep - 10, 11, 255); } else { newIntervalStep = constrain(oldIntervalStep - 10, 1, 255); } } else if ((key == RIGHT_KEY) && !Repeat) postscaler = constrain(postscaler * 2, 1, 32768); else if ((key == LEFT_KEY) && !Repeat) { postscaler = constrain(postscaler / 2, 1, 32768); if ((newIntervalStep < 11) && (postscaler <= 4)) newIntervalStep = 11; } else if ((key == WHITE_PLAY_KEY) && !Repeat && !aluRemote && !digitalRead(lightmeterPin)) startRunWithMetering(); else if ((key == WHITE_PLAY_KEY) && !Repeat && !aluRemote && digitalRead(lightmeterPin)) stopRun(); else blinkFlag = false; // if we received a partial or garbled IR code, let's not confirm reception } if (blinkFlag) blinkLED(); blinkFlag = true; // Let's assume the next code is a valid one } // ISR 1 - called on IR signal coming in (falling edge on PB2) ISR(INT0_vect) { int timeStamp = TCNT0; int overFlow = TIFR & 1 << TOV0; if (irBits == 32) { // Let's check for AGC if ((timeStamp >= 194) && (timeStamp <= 228) && (overFlow == 0)) { receivedData = 0; irBits = 0; } else if ((timeStamp >= 159) && (timeStamp <= 193) && (overFlow == 0)) ReceivedCode(1); } else { // Here comes the Data in if ((timeStamp > 44) || (overFlow != 0)) { irBits = 32; // Invalid data, so try again } else { if (timeStamp > 26) { receivedData = receivedData | ((unsigned long) 1 << irBits); } if (irBits == 31) { ReceivedCode(0); } irBits++; } } TCNT0 = 0; // Clear Counter0 TIFR = TIFR | 1 << TOV0; // Clear Overflow GIFR = GIFR | 1 << INTF0; // Clear INT0 flag } // ISR 2 - called by timer1 (for intervalometer) ISR(TIMER1_COMPA_vect) { if (newIntervalStep != oldIntervalStep) { OCR1C = newIntervalStep; OCR1A = OCR1C; } if (divider == 0) { singleFrame(); } divider++; divider %= postscaler; // modulo trick to allow intervals > 4.3 Sec } void loop() { // Our loop() is empty, since everthing happens through Attiny timeStamprs/Counters and Interrupts :) } // Here come the various relay plays, simulating what a finger on the camera trigger would do to the built-in switches. void blinkLED() { digitalWrite(ledPin, HIGH); _delay_ms(20); digitalWrite(ledPin, LOW); } void startRunWithMetering() { // Normaler Startzyklus wie mit EA-1 digitalWrite(lightmeterPin, HIGH); digitalWrite(holdPin, HIGH); digitalWrite(loadPin, HIGH); _delay_ms(250); digitalWrite(loadPin, LOW); _delay_ms(70); digitalWrite(startPin, HIGH); } void stopRun() { digitalWrite(startPin, LOW); _delay_ms(70); digitalWrite(holdPin, LOW); digitalWrite(lightmeterPin, LOW); digitalWrite(ledPin, HIGH); _delay_ms(250); digitalWrite(ledPin, LOW); lmMode = LM_MODE_1ST_SINGLESHOT; } void meterOnce() { digitalWrite(lightmeterPin, HIGH); digitalWrite(ledPin, HIGH); _delay_ms(350); digitalWrite(ledPin, LOW); digitalWrite(lightmeterPin, LOW); lmMode = LM_MODE_SUB_SINGLESHOT; } void singleFrame() { digitalWrite(loadPin, HIGH); _delay_ms(10); // 10ms is short but subsequent exposures will have a pre-loaded cap. digitalWrite(loadPin, LOW); digitalWrite(startPin, HIGH); _delay_ms(20); digitalWrite(startPin, LOW); digitalWrite(loadPin, HIGH); // Pre-load the start capacitor since for the next exposure. Reduces latency. :) _delay_ms(50); digitalWrite(loadPin, LOW); } Und falls es jemanden interessiert, hier der derzeitige Code. Funktioniert fantastisch. Besonders stolz bin ich auf den main() loop :-)1 Punkt
-
Du meine Güte... Bei solchen Antworten ist es kein Wunder, das dieses Forum nach so vielen Jahre 'einschläft' weil kaum noch jemanden was schreiben möchte. Man meint ja fast, ihr seit alle umsatzbeteiligt an diesem Kino Ist doch nicht erst seit dem 'Digitalzeitalter', das es eben unterschiedliche Kinomitarbeiter mit unterschiedlichen Wissen gibt... Das jeder alles besser weiß und machen würde, ist natürlich auch nicht neu. Wieso man einen Thread nicht einfach ignorieren kann, wenn man denkt, dem Ersteller ist nicht zu helfen, ist mir ein Rätsel1 Punkt