Rangliste



Beliebte Inhalte
Anzeigen von Inhalten mit der höchsten Reputation auf 03.11.2019 in allen Bereichen
-
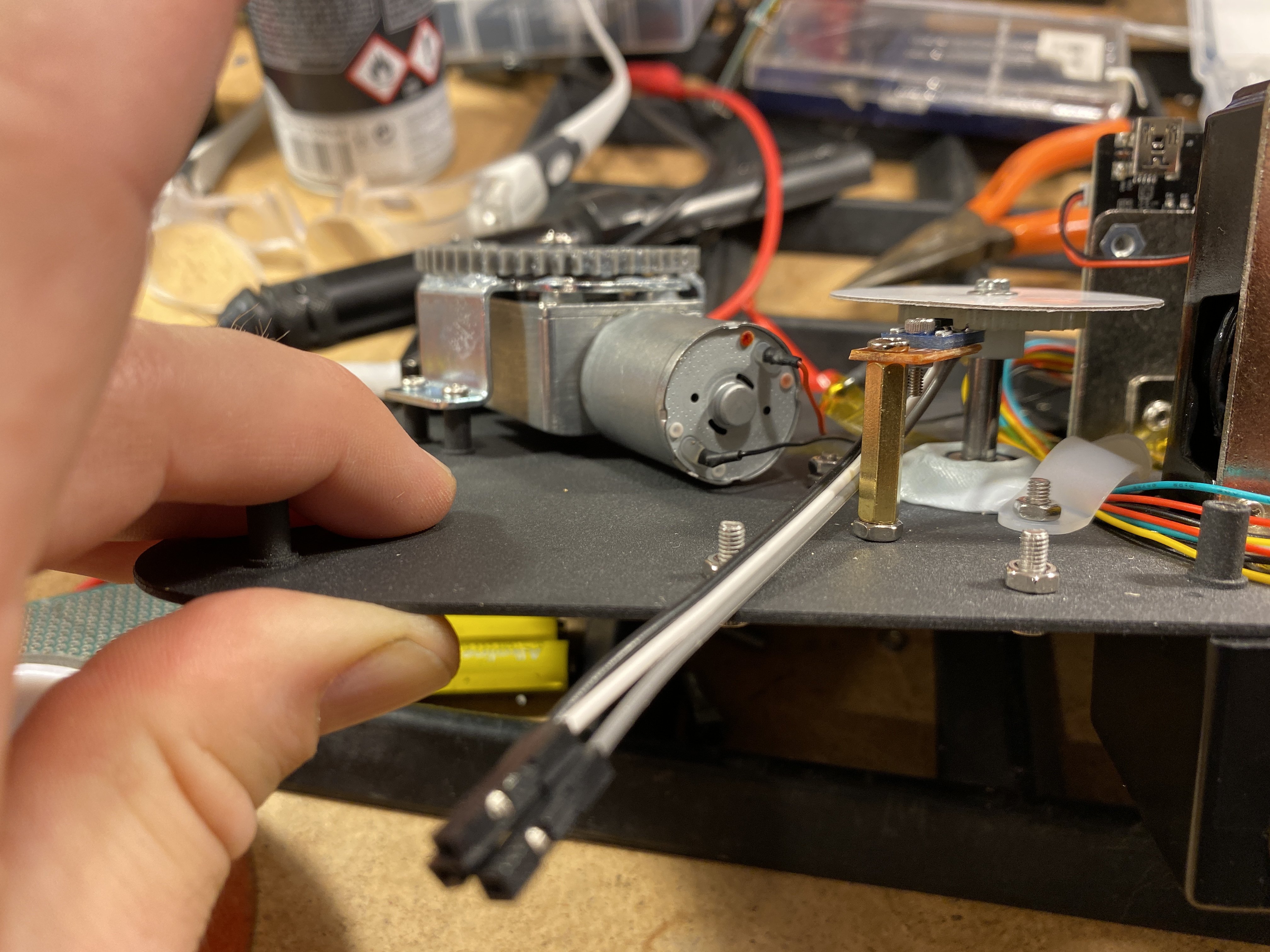
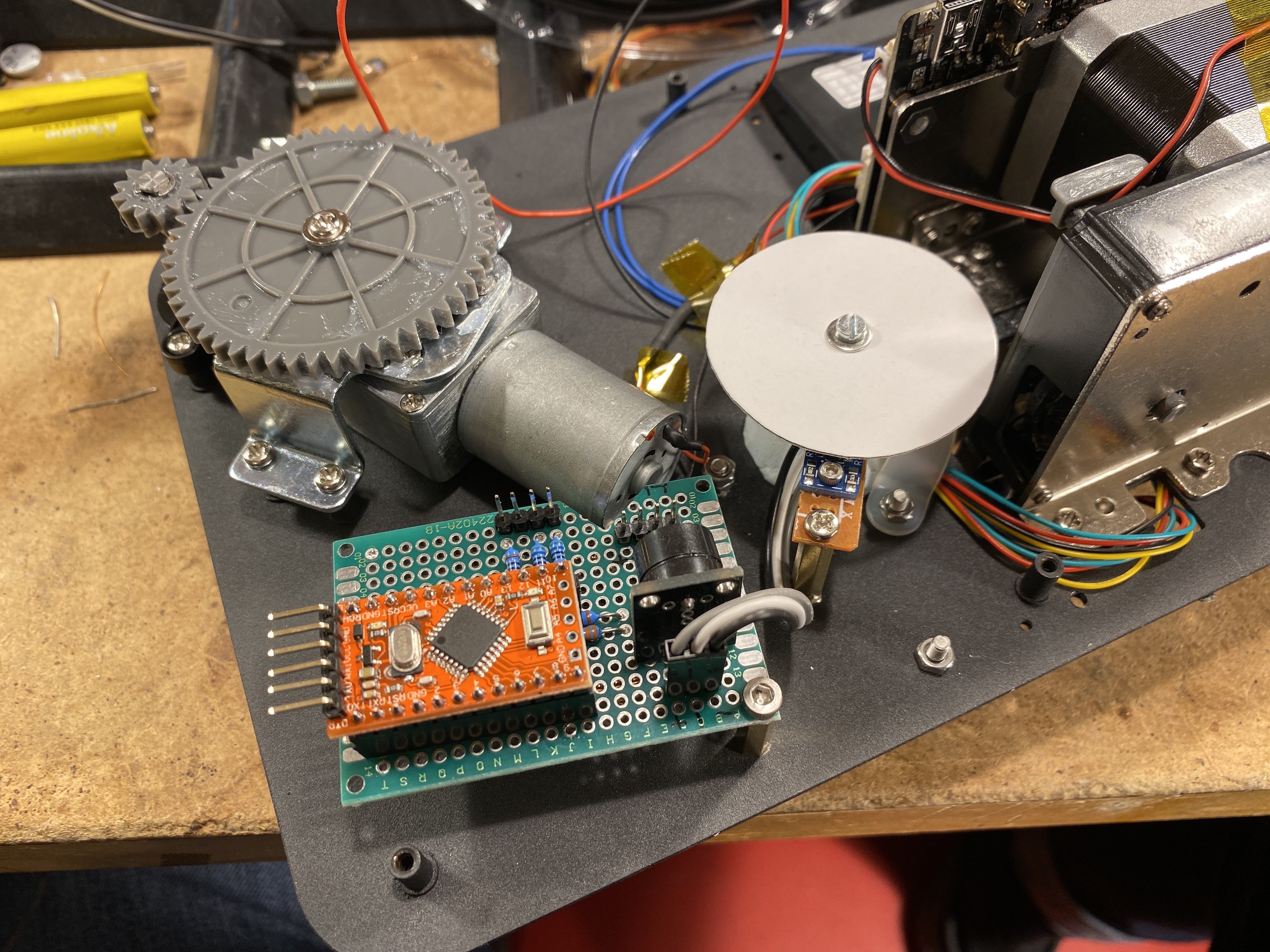
So, nu isser erstmal fertig. Auf die andere Seite der kugelgelagerten Zahnrolle ist eine Pappscheibe mit 16 abwechselnd schwarzen und weissen Sektoren gekommen, ein überzähliges Synkino-Auge (Reflexsensor) kriegt so zuverlässig pro Filmbild einen Impuls. Praktisch ist, dass ich die ganzen Löcher, die die starren Bolzen hielten, jetzt zum montieren von Dingen verwenden kann. ? Um die Pulse zu verarbeiten, sitzt unten links jetzt ein kleiner Arduino Micro (€1,62). Der kann vier Dinge: Piepsen, Leuchten, Zählen und Schalten. ? Kriegt er für mind. 10 Sekunden zwischen 1,8 und 2,2 Impulse pro Sekunde, weiss er, dass der Scanner am scannen ist. Das schlatet ihn quasi scharf — fällt die Impulsfrequenz auf 0, schaltet er ein kleines Solid-State-Relais, dass den WOlverine Scanner abschaltet. Zusätzlich piepst er noch ne Weile rum, so weiß man, dass der Scanner bereit für den nächsten Film ist. Alle anderen Impulsraten werden als "Rangieren" gewertet und ignoriert. Funktonierte heute Nacht schon mal prächtig — eine 120m Rolle zu scannen dauert immerhin gute 4 Stunden, wenn man das um Mitternacht startet, würde der Scanner an dich stundenlang ein weißes Bild scannen und ewig weiterlaufen. Jetzt schaltet er sich danach zuverlässig ab. Eine RGB-LED (hübsch durch ein leeres Schraubloch sichtbar gemacht) zeigt auf einen Bilck den aktuellen Zustand, auch aus der Ferne gut sichtbar. Mittlerweile ist der Scanner nämcih echt fast komplett lautlos geworden. Die Qualität ist natürlich immer noch unterirdisch. Aber so bleibt er jetzt erst mal. Hier noch, falls jemand nachmachen will, der Code. Nicht wunderschön, aber funktioniert. ? /* Turn off the crappy Wolverine Scanner when it stops moving */ #define impDetectorPin 3 #define buzzerPin 5 #define relaisPin 12 #define blueLedPin 10 #define greenLedPin 11 #define redLedPin 13 #define SCANNER_RUNNING 1 #define SCANNER_GETTING_LOADED 2 #define SCAN_FINISHED 3 uint8_t myState; uint8_t prevState; unsigned long millisNow = 0; unsigned long lastMillis = 0; volatile unsigned long impCounter = 0; unsigned long lastFrameCount = 0; bool scannerEverRan = false; // Don't beep right away float lastFreq; void setup() { pinMode(impDetectorPin, INPUT); pinMode(buzzerPin, OUTPUT); pinMode(relaisPin, OUTPUT); pinMode(redLedPin, OUTPUT); pinMode(blueLedPin, OUTPUT); pinMode(greenLedPin, OUTPUT); Serial.begin(115200); tone(buzzerPin, 6000, 200); // Hello! delay(250); digitalWrite(relaisPin, LOW); redLight(); attachInterrupt(digitalPinToInterrupt(impDetectorPin), countISR, CHANGE); } void loop() { measureScannerFreq(10); // measure speed over 10 seconds if ((lastFreq <= 1.7) || (lastFreq >= 2.3)) { if (lastFreq == 0.0) { if (scannerEverRan) { myState = SCAN_FINISHED; } } else { myState = SCANNER_GETTING_LOADED; } } else { myState = SCANNER_RUNNING; scannerEverRan = true; } if (prevState != myState) { switch (myState) { case SCANNER_RUNNING: greenLight(); Serial.println("Scan läuft."); break; case SCANNER_GETTING_LOADED: blueLight(); Serial.println("Scanner wird geladen."); break; case SCAN_FINISHED: Serial.println("Scan ist fertig."); redLight(); powerOff(); scannerEverRan = false; myState = 0; break; default: break; } prevState = myState; } } void measureScannerFreq(int checkIntervalSec) { millisNow = millis(); if (((millisNow % (checkIntervalSec * 1000)) == 0) && (lastMillis != millisNow)) { lastFreq = float((impCounter - lastFrameCount)) / checkIntervalSec; lastFrameCount = impCounter; lastMillis = millisNow; Serial.print(lastFreq); Serial.println(" B/s"); Serial.println(""); } } void redLight() { digitalWrite(redLedPin, HIGH); digitalWrite(greenLedPin, LOW); digitalWrite(blueLedPin, LOW); } void greenLight() { digitalWrite(redLedPin, LOW); digitalWrite(greenLedPin, HIGH); digitalWrite(blueLedPin, LOW); } void blueLight() { digitalWrite(redLedPin, LOW); digitalWrite(greenLedPin, LOW); digitalWrite(blueLedPin, HIGH); } void yellowLight() { digitalWrite(redLedPin, HIGH); digitalWrite(greenLedPin, HIGH); digitalWrite(blueLedPin, LOW); } void countISR() { impCounter++; } void powerOff() { digitalWrite(relaisPin, HIGH); delay(3000); digitalWrite(relaisPin, LOW); tone(buzzerPin, 6000, 1000); // Hello! delay(2000); tone(buzzerPin, 6000, 1000); // Hello! delay(2000); tone(buzzerPin, 6000, 1000); // Hello! delay(2000); tone(buzzerPin, 6000, 1000); // Hello! delay(2000); tone(buzzerPin, 6000, 1000); // Hello! delay(2000); tone(buzzerPin, 6000, 1000); // Hello! delay(2000); tone(buzzerPin, 6000, 1000); // Hello! delay(2000); tone(buzzerPin, 6000, 1000); // Hello! delay(2000); tone(buzzerPin, 6000, 1000); // Hello! delay(2000); tone(buzzerPin, 6000, 1000); // Hello! delay(2000); }
 2 Punkte
2 Punkte -
Jetzt müsste man "nur noch" die Filmbühne durch eine solche aus einem passablen Projektor tauschen, um einen sauberen Bildstand zu erreichen. Das ist dann aber bald wirklich so wie die Autoreparatur, wo ein neuer Wagen zwischen die Nummernschilder geschraubt wird.1 Punkt
-
Viele Gesellschaften leben noch in mittelalterlichen Verhältnissen. Du kannst praktisch drei Viertel vom amerikanischen Kontinent nehmen, Afrika, weiteste Teile Asiens und auch etwa die Hälfte von Europa. Das Dorf, in dem ich zur Zeit wohne, ist katholisch beherrscht, als ehemals Reformierter merke ich das. Entsprechend sind Frau und Mann weltweit im traditionellen Rollenverständnis. Ich hatte mal einige Zeit in Griechenland gelebt, dort gehört sogar noch viel Land der Kirche. Pauschalisierend gesagt muß der Südländer, weil er sonst nicht viel hat, eine röhrende Maschine unter dem Arsch haben. Sizilianer, Türken, Ägypter, Israeli in Elektroautos? Vergiß es. Ja, gut, Israeli noch am ehesten. Aber auch der sich so fortschrittlich gebende Yankee sähe sich ins von Pferden gezogene 19. Jahrhundert zurückstürzen, müßte er auf Motoren verzichten. Es greift doch keiner mehr zum Handwerkzeug, allein zum Schrauben eindrehen muß ein Elektrogerät her. Die Hecke von Hand scheren? Sicher nicht. Eine Kaffeemühle kurbeln? Wir sind alle Opfer eines Fortschrittwahns, der uns aber um nichts vorangebracht hat. Menschlichen Fortschritt hat es seit der Französischen Revolution eigentlich keinen gegeben. Ah, doch, die Emanzipation der Frau in unvollständigem Maße. In der Schweiz immer noch Lohnungleichheiten, zu wenige Kita, Mutter- und Vaterschaftsurlaub lächerlich kurz. Wißt ihr, daß es bei uns ab 1. Juli 2020 zwei Wochen bezahlten Vaterurlaub geben soll? Heute ist es genau ein Tag. James Bond ist eine idiotische Figur, gut fürs Kino, ansonsten ganz elend.1 Punkt
-
Top 30 - Spielwoche ab 31. Oktober 2019 - 3 Spieltage (Do-Sa) Insgesamt an den drei o.a. Spieltagen bundesweit ca. 2.000.000 Besucher Anmerkungen: Das perfekte Geheimnis bereits 850.000 Besucher und einen Besucherschnitt von über 1000 pro Einsatz 1 Das perfekte Geheimnis 2 Joker 3 Maleficent - Mächte der Finsternis 4 Terminator: Dark Fate 5 Die Addams Family 6 Ich war noch niemals in New York 7 7. Kogustaki Mucize 8 Halloween Haunt 9 Scary Stories To Tell In The Dark 10 Parasite 11 Shaun das Schaf - Der Film: UFO-Alarm 12 Bayala - Das magische Elfenabenteuer 13 Gemini Man 14 Angry Birds 2 - Der Film 15 Everest - Ein Yeti will hoch hinaus 16 Dora und die goldene Stadt 17 Deutschstunde 18 Dem Horizont so nah 19 Systemsprenger 20 Porträt einer jungen Frau in Flammen 21 Eine ganz heiße Nummer 2.0 22 Der König der Löwen 23 ES: Kapitel 2 24 Downton Abbey 25 Lieber Antoine als gar keinen Ärger 26 Nurejew - The White Crow 27 Once Upon A Time ... In Hollywood 28 Der Glanz der Unsichtbaren 29 Zombieland 2: Doppelt hält besser 30 Invisible Sue - Plötzlich unsichtbar1 Punkt
-
Ist das nicht herrlich................... Ein "perfekter" Film der KEINE 53% kostet :--))1 Punkt
-
Ende November werden acht meiner Filme in einem Filmkonzert auf dem Filmfest Braunschweig gezeigt. Analogprojektion mit Livemusik, unter anderem mit einem Trautonium. Vielleicht ist ja die/der eine oder andere mit dabei. Sagt Bescheid! https://www.filmfest-braunschweig.de/programm/filmsuche/details/filmkonzert-wellenvorm-patrick-mueller-9429/1 Punkt
-
Apropos.... Ich habe da noch eine Doku über Sala und das Trautonium.... soll ich den nach Deidesheim mitbringen?1 Punkt