Rangliste



Beliebte Inhalte
Anzeigen von Inhalten mit der höchsten Reputation auf 26.12.2022 in allen Bereichen
-
Habt Ihr den Artikel überhaupt gelesen? Die Schauspielerin war im Trailer zu sehen und wurde "danach" aus dem Film geschnitten. Zitat: Ein Richter in Kalifornien hat die Klage zugelassen, weil ein Trailer als Werbung einzuordnen sei und somit dem Recht der Werbung und dem Gesetz gegen unlauteren Wettbewerb unterliege. »Im Kern ist ein Trailer Werbung, die darauf ausgelegt ist, einen Film zu verkaufen, indem den Verbrauchern eine Vorschau des Films geboten wird Auch wenn ich das amerikanische Recht nicht mag, finde ich diese Argumentation nachvollziehbar. Punitive damages sind übrigens kein reiner Schadensersatz: https://de.m.wikipedia.org/wiki/Punitive_damages Zitat: Der Zweck ist den Beklagten für sein Verhalten zu bestrafen; ihn davon abzuhalten, dieses rechtswidrige Verhalten zu wiederholen (Spezialprävention); auch andere davon abzuhalten (Generalprävention). Punitive damages werden grundsätzlich nur für außergewöhnlich grob schuldhaftes, vorsätzliches Verhalten zuerkannt, nicht dagegen bei bloßer Fahrlässigkeit. Für amerikanisches Recht doch alles völlig normal und kein Grund, sich kurz vor Jahresende aufzuregen. Kommt gut in das neue Jahr! Salvatore3 Punkte
-
Da helfe ich gern wieder mit....😀2 Punkte
-
Das wird der Schlauch werden, sollte das mit dem Nachbau klappen. Schlauchanschluss und Schlauchschraube habe ich bereits an den neuen Silikonschlauch angepasst. https://www.schlauch-profi.de/silikonschlauch-schwarz-17-mm-aussen-oe-26702 Punkte
-
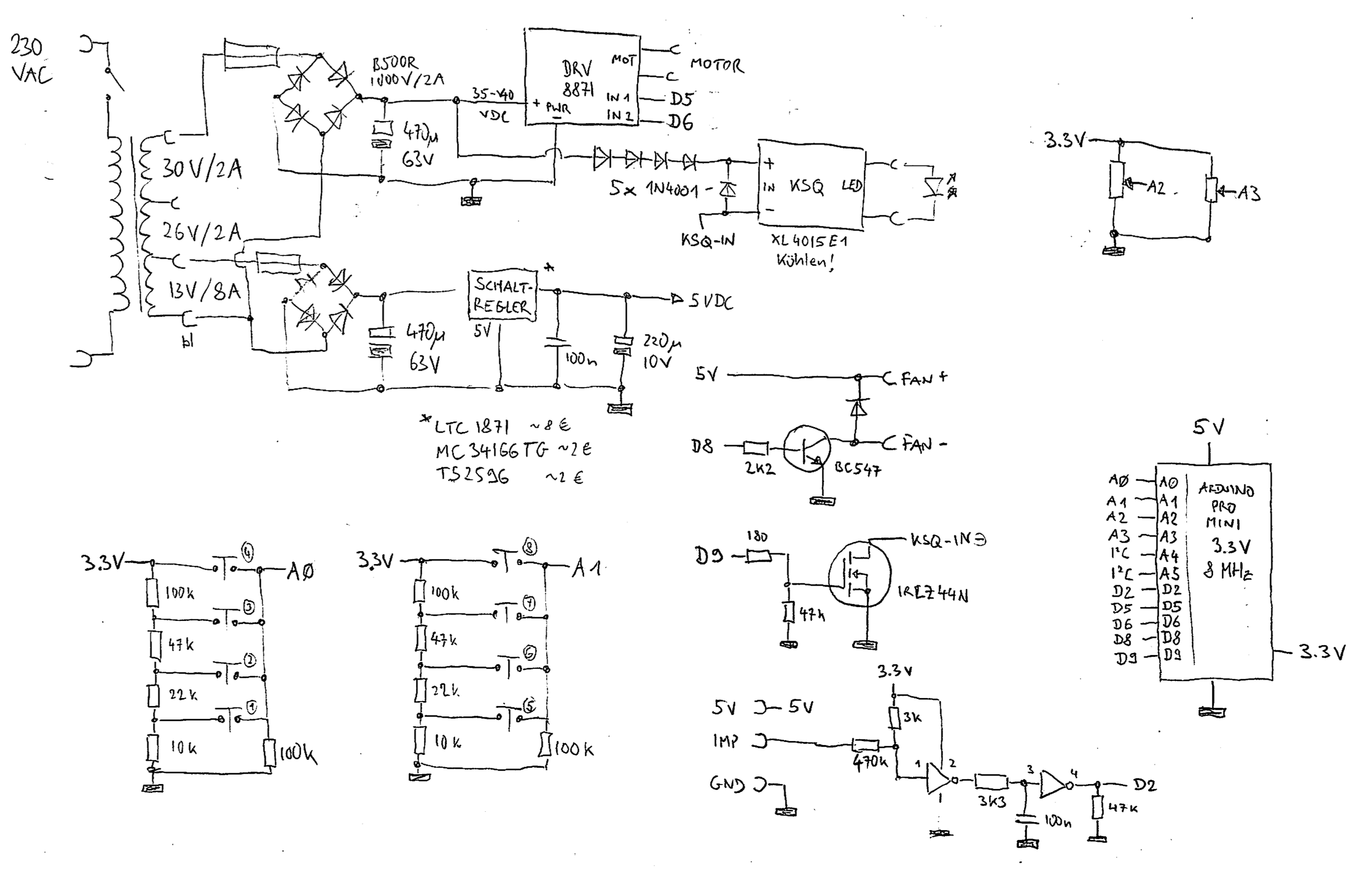
Lieber Harald, ich habe den Schaltplan jetzt mal rekonstruiert, unten hängt er an. Ins Reine Zeichnen kommt noch, vielelicht auch eine Platine, aber das ist alles kein Hexenwerk: Fangen wir links oben an: Zu sehen ist der Trafo des Noris mit seinen verschiedenen Abgriffen. de 13V/8A Abgriff geht normalerweise an die Kaltlichtspiegellampe, ich mache aus den 13V mit einem kleinen Schaltreglermodul aus der Bastelkiste stabilisierte 5V für den Arduino (und potenziell auch für den Raspi, aber das steht noch aus). Die 26V/30V Abgriffe sind iirc für 18 vs 24 fps gedacht, also Motorstrom, ich nutze nur den 30VAC-Abgriff, richte ihn gleich und siebe. Die gleichgerichtet 35-40 VDC gehen direkt an das "DRV8871 Breakout Board", das ist der Motorcontroller. Gibt es von Adafruit, oder baugleich auch als China-Klon. D5 udn D6 am Motorcontroller bezeichnet hier die Verbindung mit Pin D5 und D6 des Arduino, der hierüber den Motor steuert. Die vier seriellen Dioden reduzieren die Spannung für die Konstantromquelle (zum Betrieb der LED) etwas, da ich deren Elkos nicht so am Limit betrieben wollte. Die KSQ ist auch ein fertiges Modul auf Basis des XL4015 Chips. Ich verwende zum Beispiel dieses. Wichtig ist, eine Version mit zwei Spindelpotis zu finden, denn nur die erlaubt eine Begrenzung des Ausgangsstroms für KSQ-Betrieb. Auf meinem Chip klebt ein Mini-Kühlkörper (von einem Raspi-Gehäuse-Kit), da er mir ein bisschen zu warm wurde im Dauerbetrieb. Der Pluspol der KSQ hängt direkt hinter den vier Dioden, der Minuspol wird über den IRLZ44N MOSFET geschaltet (siehe Mitte unten). Hier tut's wohl auch quasi jeder andere, aber den gab meine Bastelkiste eben her. Über dem MOSFET sieht man den Transistor, der das LED-Lüfterchen anschaltet, sobald die LED an ist. Die Taster-Kaskaden unten Links sind die Bedientasten (der Anschluss an Analogports spart Pins). Ganz unten in der Mitte bereiten zwei Schmitt-Trigger aus einem 74HC14 die Impulse des optischen Sensors auf, der meldet, wenn die Motorwelle eine Umdrehung gemacht hat (QRE1113, exakt wie beim Synkino). Das kann man natürlich auch über Hall-Sensor oder Reed-Kontakt lösen. Ich mags halt optisch. Die beiden Trimmer rechts oben sind nur zum Einstellen der Motordrehzahl im Step- und im Laufbetrieb. Wenn ich Filme mit dem Scanner zurückspule, drehe ich das Dauerlaufpoti gern mal höher. Wichtig ist noch, dass der Arduino Pro Mini die 3.3V Version mit 8 MHz ist, nicht die übliche 5V-Version — und zwar, weil der Raspi I2C nur mit 3.3V verträgt und ich mir die bidirektionalen Pegelwandler sparen wollte. Die 3V3 im Plan kommen auch alle vom VCC Pin des Pro Mini. Man kann das ganze prima auf eine Lochrasterplatine aufbauen. Meine soll aber bitte nicht Beispiel sein, da sie "fliegend und planlos" entstanden ist. 🙂 Eigentlich ist das schon alles, der Rest der Logik steckt im Arduino (Repo-Link siehe oben). Bei Fragen bitte fragen!
 2 Punkte
2 Punkte -
Gästehaus gebucht.1 Punkt
-
Und dieses Mal sollten weder die Filme noch das Bier ausgehen… 😉1 Punkt
-
Helfe gerne ebenfalls1 Punkt
-
Vielleicht gibt es ja noch irgendwo auf der Welt auch eine analoge Kopie mit DTS? Im Auenland, Lummerland, Zamunda oder Bikini Bottom?1 Punkt
-
Mit der Grundoptik scharfstellen, sie festsetzen. Danach mit dem Anamorphoten beste Schärfe herausholen. Optimal sind anamorphotische Projektionsoptiken, suboptimal sind Vorsätze. Auf jeden Fall Vorsatz und Grundoptik so nah zueinander bringen wie möglich, verschraubt ist besser als nicht.1 Punkt
-
Im Trailer zu ROGER RABBIT gab's eine Einstellung, in der Bob Hoskins brüllt: "Ich bin ein Schwein!". Die gesamte "Schweinskopf"-Sequenz wurde vor der Uraufführung herausgeschnitten, warüber ich als Kinogast mich damals sehr gewundert habe. Hätte ich wohl klagen sollen!0 Punkte