ruessel
-
Gesamte Inhalte
2.675 -
Benutzer seit
-
Letzter Besuch
-
Tagessiege
32
Inhaltstyp
Profile
Forum
Galerie
Alle erstellten Inhalte von ruessel
-
Es geht ja doch: Fomapan R100 als Negativ entwickeln. https://www.photrio.com/forum/threads/fomapan-r100-not-developed-as-reversal.104136/
-
70mm Kinofilme - große (Bild)Unterschiede?
ruessel antwortete auf ruessel's Thema in Allgemeines Board
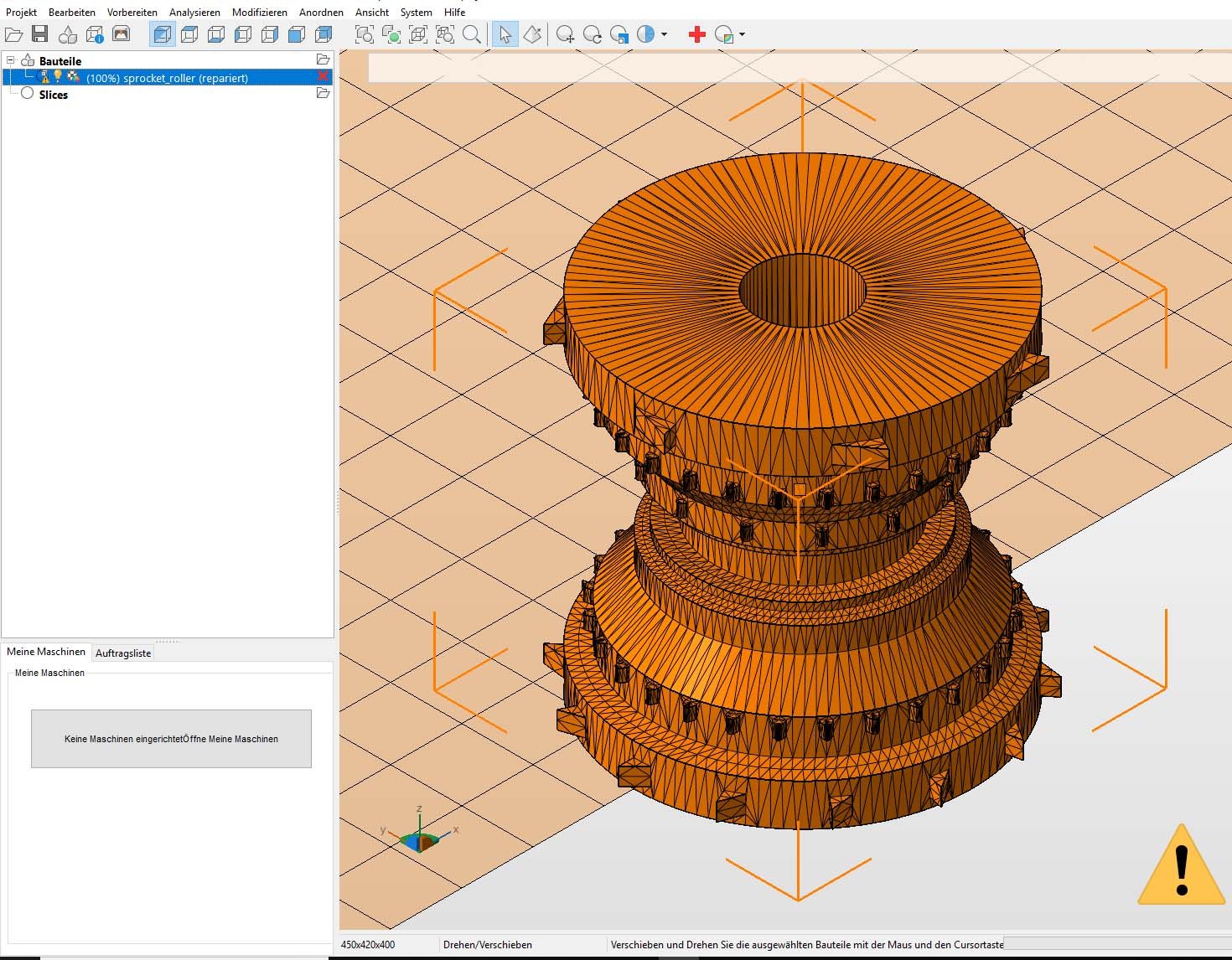
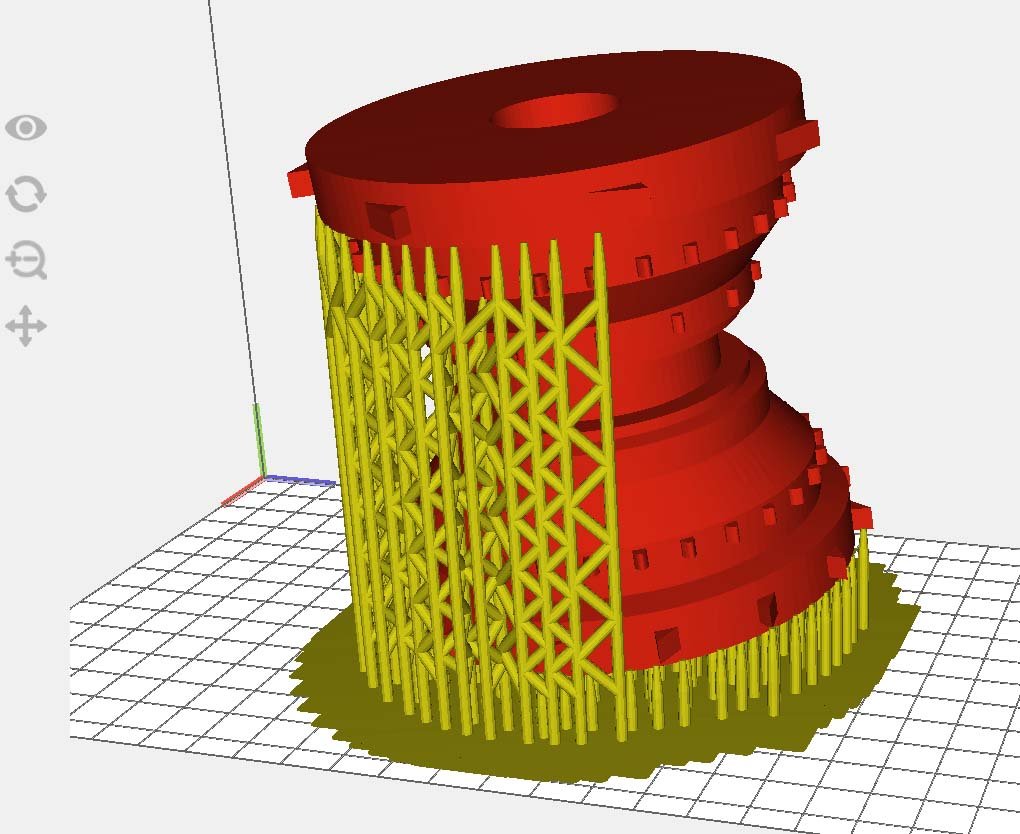
Moin, also Perfo sitzt immer gleich? Zahnräder stelle ich mit UV Printer her (ist so ein 15.000 Euro Teil aus der Medizin, für menschl. Ersatzteile +-0.02mm), die Zahnräder passen auch gut, jedenfalls für meine Anwendung. Stahl ist natürlich verschleißfester, deshalb habe ich hier ernemann 35mm Zahnkränze, die Teile ich und werden fest verlängert mit Druckteilen, fertig sind 70mm Transportrollen. Im Moment bastel ich an 8mm, da das Gate so klein ist und die Beleuchtung durch das Nadelöhr muss, wird das ein eigenständiges Gerät. 16/35/70mm wird eine Weiterentwicklung vom Kinographen.... nur sehr digitaler und Kleincomputergesteuert. Sobald es mit 70mm bei mir losgeht, können wir uns gerne austauschen...obwohl ich nix groß zu tauschen habe, bin 70mm Anfänger und sauge Infos gierig ab. ?
-
Ich muss aber jeden Pin einzeln Aktivieren, dann lieber einmal löten ?
-
Hallo, da ich gerade an einem Filmscanner bastel, der (warum auch immer) sehr universal bis 70mm funktionieren sollte, frage ich nach Film/Infos im Netz einschl. Bemaßungen um die Teile wie Zahnräder, Gate etc. 3D drucken zu können. Gibt es so detaillierte 70mm Seiten im Netz? Da ich heute meinen ersten 70mm Film bekommen habe (ein kleines Stück Ben Hur) wundere ich mich schon, ich dachte man wollte eine sehr gute Bildqualität für große Leinwänden haben..... und verschwendet dann so viel Platz. ? Von der 70mm Filmbreite bleibe netto nur 49mm Bildbreite effektiv übrig (ja, ist eigentlich Groß), evtl. nimmt das Projektorgate davon auch noch etwas weg. Sind andere 70mm Filmformate (ausser IMAX) netto wesentlich breiter? Wie groß sind die Kameranegative? Lag die Perfo bei anderen 70mm Verfahren weiter außen? Wie schaut es mit dem Ton aus, hier habe ich 4 Magnettonspuren. Gab es auch Lichtton? Gab es zuletzt digitalen Ton? IMAX läuft ja quer, ist dort die Perforation aber auch gleich? Fragen über Fragen..... Wer hat Antworten bzw. interessante Links oder auch Buchtipp........ ich finde nur Oberflächliches im Bereich 70mm Technik..... Danke!
-
Wow..... sollte der Cinegraph irgendwann laufen, gibt es auch eine 70mm Version davon. ? Die Zahnräder von 35mm Projektoren besitzen die selbe Perforation, nur der Abstand verdoppelt sich. Dank Ulrich, schmiegt sich nun "Ben Hur" von der deutschen Erstaufführungskopie an einem noch 35mm breiten Ernemann Zahnrad. Da alles gut passt, schätze ich, dass IMAX Film auch passen würde, IMAX werden keine neue Perforation erfunden haben, wenn 70mm so auch gut in der Praxis funktioniert. In der Zwischenzeit war ich auch fleißig. Der Lichttrichter für die Mattscheibe trocknet gerade aus, habe sie schwarz 3D gedruckt und im Innenraum wo die LEDs strahlen mattweiß gespritzt, hatte kein weißes Material zur Hand. Einige Stunden habe ich mit Schaltern am Arduino verbracht. Am Anfang hatte ich die "Pulldown" Widerstände vergessen und wunderte mich wo im Skript der Fehler lag.... es waren Zufallsschalter. Nun löte ich fleissig 10K Widerstände auf Masse........
-
Die nächsten Tage sind voll mit Kleinigkeiten besetzt: 1. Der Cinegraph benötigt mit seinen 240 Meter Aufwickelmotoren ein größeres Experimentiergehäuse, mir ist schon ein Motor vom Tisch gefallen. 2. Der 230V Dimmer muss endlich umgebaut werden, so das er mit dem Arduino gesteuert werden kann. 3. Der Touchscreen fliegt auch so auf dem Tisch rum, Gehäuse entwerfen und drucken. 4. Es werden wohl noch 8mm Film-Führungsrollen benötigt. Entwerfen + drucken. 5. LEDs mit der Mattscheibe verbinden, Isolierung für das 5V Netzteil herstellen, ausgelegt für 70mm Breitwandfilm. Gehäuse entwerfen + drucken. außerdem merke ich, wenn man mit dem Arduino schnell mal ein Code testen möchte, benötigte ich einen schon fertig verkabelten Schalter/Drehregler ec. um ganz schnell an die Platine zu stecken. Kann man alles fertig kaufen aber DIY finde ich smarter.... meine Drehreglerbox ist der Anfang.
-
-
Heute kam auch mein erster Cinemascop Film, Kodak Vision 2383 auf Fujicolor von FotoKem. Ich habe jetzt schon Digitalisierungsstau ?
-
Wäre klasse!! Dann hätte ich auch gleich Maße für das 70mm Filmgate ? Dann fehlt nur noch IMAX.
-
Gerade kam ein Paket mit mehreren Erneman Zahnräder und Transportrollen. Die Zahnräder sind angeblich schmaler für Magnetton. Frage: wenn ich das Rad mittig durchtrenne und verlängere, greift es dann auch sicher in 65/70mm Film ein....ist also die Perforation gleich?
-
Arduino und Drehpoti, so richtig klar ist es auf den ersten Blick nicht. Ein Pol vom Poti kommt an Masse, der andere feststehende Pol an 5V, der drehbare Schleifer wird verbunden an einen der analogen Eingängen des Arduinos. Je nach Spannung am Schleifer des Potis erkennt der Computer den digitalen Wert 0-1023. Es werden also die 5V Spannung in 1024 Schritte zerteilt. In vielen Dokumentationen wird ein lineares 10K Poti dafür benutzt. In einen Probeaufbau, hatte ich aber am Seriellen Monitor stärke Schwankungen bei 10K, der Wert schwankte immer +-2 Werte. Erst ein 100K Poti erzeugte saubere stehende Werte, hier stand der Wert beim loslassen des Drehreglers wie ein Fels in der Brandung. Leider hatte mein Händler keine 100K vorrätig, ich habe nun 50K genommen. Was passiert nun gegenüber der Dokumentierten 10K? Es fließen weniger Milliampere durch das Poti, leichtere Verschmutzungen (zusätzlicher Widerstand) am Drehregler verursachen weniger Wertänderungen. Dafür steigt die Gefahr für Funkeinstreuung von außen?
-
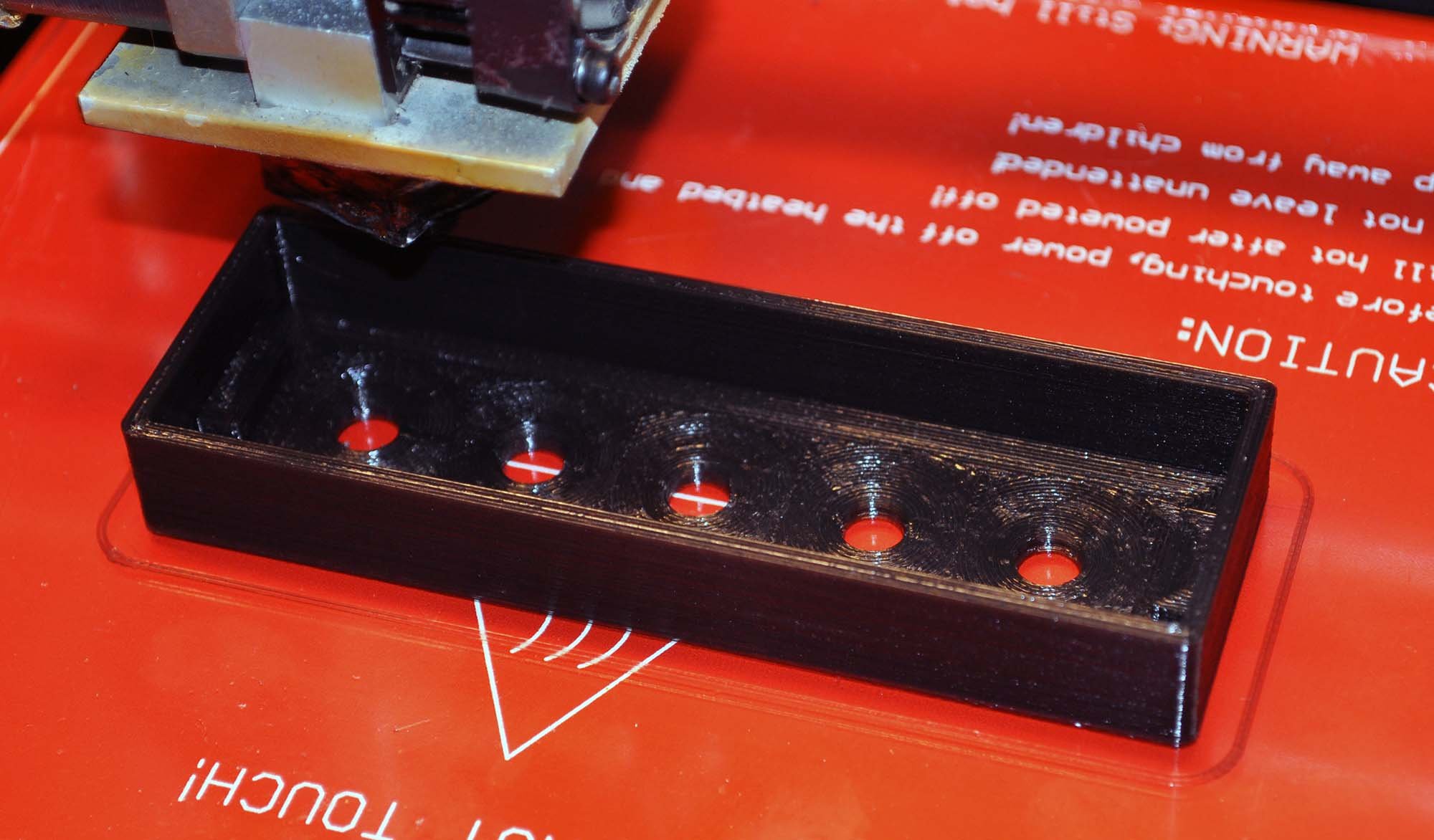
Ich sitze gerade am 3D Drucker und printe mir eine Potibox. Dann kann ich in Ruhe experimentieren. Ich habe 5 Potis 50KOhm genommen, so geht zur Not auch RGBW + Helligkeit einzeln. Ja, ich werde eine Milchglasscheibe einsetzen, sie liegt hier schon, 4mm stark und 60% Durchlässigkeit. Dafür muss ich auch noch eine Halterung printen, kommt am Anschluß. Solange ich das 5V Netzteil noch nicht habe, die Colornegative von CEWe noch nicht entwickelt sind, habe ich auch keinen eigenen Stress.....
-
-
Verrückte Idee..... ob man mit dem 3D Druck eine 9,5mm Stanze bauen kann? Muss ja nicht Kilometer von Film halten.... 15 Meter würden ausreichen.
-
Evtl. könnte ich 9.5mm Kodachrome aus den 80er Jahren bekommen, im Keller gelagert. Kann da noch was in SW entstehen? Lust hätte ich schon, so eine Dose frisch zu bestücken und mal testen.
-
Angebot und Nachfrage. Das Angebot dürfte recht selten sein, allerdings weiß ich nicht wieviel Todd AO es wirklich noch gibt. Aber vielleicht wurde mit dieser Kamera der Film Porgy und Bess oder Cleopatra oder Hello Dolly gedreht..... da weht schon ein Hauch der Filmgeschichte an dieser Kamera. Ich könnte mir das Teil schon in meiner fiktiven großen Villa vorstellen.
-
Neee...die "normale" Bucht. Ab und an gibt es was zum kleinen Preis...... auf dieses Gerät hat keiner geboten......war daher ein Schnäpper.
-
Ja, drei Schrauben entfernt und man kommt an die Heiligkeit der Pathe..... der komplette Antrieb, Filmgate mit Andruckplatte einschl. Greifer ist in dieser Blechdose. Meine erste Kamera, die keinen eigenen Greifer besitzt. In der Kamera sitzt nur das Objektiv und der Shutter....... Der Film selber, war nicht auf Tageslichtspulen, sondern wurde direkt auf die beiden "Spulenkerne" gewickelt. Ob das wirklich die 9.5mm Filmer damals um 1955 selber gemacht haben?
-
Oje.... das LED Board ist bei genauen Studium, sehr umfangreich. Zur Zeit läuft es im eigenen HSV Farb-Modus. Das scheint sehr hilfreich zu sein, mit drei Werten sind 32 Bit Farbauflösung möglich. Normalerweise gehen bei RGB zu je 8 Bit nur 24 Bit Farbauflösung. Im HSV Modus werden aber 32 Bit erzeugt, drei RGB Leds werden zusammengefaßt! Es gibt also Subpixel, 3 Leds auf der Platine ergeben einen Farbpunkt..... die Auflösung vertikal & horizontal geht zurück, die Farbvielfalt steigt enorm. Macht alles die Bibliothek von Adafruit selber, man braucht sich nicht darum kümmern. Ich gebe für das gesamte Neopixel shield nur noch die Farbe (Hue), die Farbstärke (Saturation) und die Helligkeit (Value) an. Allerdings habe ich den Eindruck das der kleine Arduino Uno schon etwas in die Knie geht, zumindest bei meinem jetzigen großen Skript. Schön auch, bei der Farbmitte, also helle Farbe, schaltet sich der 4 Kanal (rein Weiß) automatisch dazu. Damit ist dann auch ein breites Farbspektrum ohne Spektrumlöcher gewährleistet, wie gut, werde ich später sehen.
-
Ich frage mich, wie haben das die Filmamateure früher gemacht? Selber mit dem Schraubenzieher den Film eingelegt? Bestimmt nicht, ich vermute man hat eine Dose abgegeben zum entwickeln und konnte eine neue (gebrauchte) frisch mit Film gefüllte Dose mitnehmen. In der Kamera gibt es keinen Greifer...nix. Muss sich alles in der Blechdose befinden..... so kann man natürlich billig Kameras verkaufen. Morgen schaue ich mal rein.....
-
Gerade ist meine zweite 9.5mm Kamera angekommen. Diesmal im perfekten Zustand, Blende + Fokus lassen sich leicht drehen. Zustand fast Note 1, da sie in einer Lederhülle ankam, keine Kratzer. Motor dreht, Sucher ist klar..... kann also losgehen! ? Dazu habe ich einen Schwung Kassetten bekommen, die ich noch nicht verstehe, wie gehen die Dinger auf? Geschraubt?
-
Heute morgen, habe ich die NeoPixel Platine zusammen gelötet. Das LED Feld würde in der Größe für einen original IMAX Film (15 Perfo) ausreichen - als Hintergrundbeleuchtung. Zur Zeit läuft ein erstes Demo, gedimmt auf 5% der Helligkeit, da sonst die Spannung über den USB-Port zusammen bricht. Die 40 RGBW LEDs benötigen bei voller Helligkeit doch schon mehr Power, ein externes 5V 50 Watt Netzteil habe ich bestellt. Was haben wir hier nun? Erstmal jede einzelne LED ist auch einzeln ansprechbar, in Farbe und Helligkeit. Die LEDs besitzen 4 einzelne "Kanäle", Rot-Grün-Blau-Weiß, jeder Kanal läßt sich digital in der Helligkeit von 0-255 steuern. Das ermöglicht eine Umfangreiche Manipulation von Colornegativen. Ich muss mich da ein wenig ran tasten und durch "try & error" herausfinden, ob damit was sinnvolles gemacht werden kann. Der nächste Aufbau würde wohl ein RGBW Drehrad sein, das für jede Farbe + Weiß einen einzelnen Regler besitzt, der auch die 0-255 Werte jedes Poti anzeigt. Danach sollte der RGBW Farbsensor in das Spiel kommen, der durch das Colornegativ gemessene Werte anzeigt. Eventuell ergibt sich so durch die gemessene Abweichung eine mathematische Formel, die für eine Colorberechnung vollautomatisch eingesetzt werden kann. Ziel wäre es, die Rotmaske möglichst optimal heraus-zu-leuchten, so dass die Kamera in den Farbkanälen keine Dynamik verliert. Ob dann die Qualität der Farben noch ausreicht, wird sich auch in der Praxis sehr schnell zeigen.
-
MITCHELL BFC Todd AO 65mm Motion Picture Camera - Mint https://www.ebay.de/itm/MITCHELL-BFC-Todd-AO-65mm-Motion-Picture-Camera-Minty-Historical-S-N-4/252779371451?hash=item3adad31bbb:g:F9MAAOSwR2RaQUvf
-
-
Noch gut in Schuß..... Motor dreht und schnurrt, Blende rastet leicht, nur Entfernung ist fest.... schade das es kein SW 9,5mm Material mehr gibt......